Sorting
import numpy as np
from __future__ import annotations
from typing import Union
import networkx as nx
import math
import matplotlib.pyplot as plt
Arrays store a sequence of elements, where the amount of elements in an array is fixed and we can access them by their index.
Suppose the array starts at the memory index of $a$ and each array element occupies $b$ bytes and the first index position is denoted by $s$. Then we know that the element at index i occupies the memory range:
\[[a + b(i - s), \ a + b(i - s + 1) - 1]\]After the creation of an array, the array stores
Running time of some functionality of an array
Dynamic arrays don’t have a fixed size and can grow.
Additional needed operations
To not have to create a new array and move all elements over when appending an new element to the array, we overallocate memory for an array. The capacity of an array is then the amount of allocated space, while the size of the array is the amount of elements.
Amortized analysis determines the average cost of an operation over an entire sequence of operations.
We assign charges to operations, where some operations are charged more or less than they actually cost. If we’re charged more, we save the difference in credit and if we’re charged less, we use up some credit to pay for the difference The credit must be non-negative all the time. Then the total amortized cost is always an upper bound on the actual total cost so far.
Because a charging cost of 3 covers all running time costs, append has a constant amortized running time.
| Operation | Running complexity |
|---|---|
| Access element by position | $O(1)$ |
| Prepend/remove first element | $O(n)$ |
| Append | $O(1)$ Amortized |
| Remove last element | $O(1)$ Amortized |
| Insert, remove from the middle | $O(n)$ |
| Traverse all elements | $O(n)$ |
With linked list, each element stores the value, as well as a pointer to the next object.
When using a double linked list, we store the previous object pointer in the element
class Node:
def __init__(self, item):
self.item = item
self.prev = None
self.next = None
class LinkedList:
def __init__(self):
self.first = None
self.last = None
def append(self, item) -> None:
node = Node(item)
if self.first is None:
self.first = node
self.last = node
else:
self.last.next = node
node.prev = self.last
self.last = node
def prepend(self, item) -> None:
node = Node(item)
if self.first is None:
self.first = node
self.last = node
else:
node.next = self.first
self.first.prev = node
self.first = node
def pop(self, item) -> Union[object, None]:
current = self.first
while current is not None:
if current.item == item:
if current == self.last:
self.last = current.prev
current.prev.next = None
else:
current.prev.next = None
current.next.prev = current.prev
return current.item
current = current.next
return None
def insert(self, index, item) -> None:
i = 0
current = self.first
while i < index:
current = current.next
if current is None:
return
i += 1
node = Node(item)
current.prev.next = node
node.prev = current.prev
node.next = current
current.prev = node
def remove_last_item(self):
value = self.last.item
self.last.prev.next = None
self.last = self.last.prev
return value
def find(self, value):
current = self.first
while current is not None:
if current.item == value:
return True
return False
def __str__(self):
linked_list = '['
current = self.first
while current.next is not None:
linked_list += str(current.item) + ', '
current = current.next
linked_list += str(current.item) + ']'
return linked_list
l = LinkedList()
for i in range(10):
l.append(i)
print(l)
l.prepend(8)
print(l)
l.pop(2)
print(l)
l.insert(3, 12)
print(l)
[0, 1, 2, 3, 4, 5, 6, 7, 8, 9]
[8, 0, 1, 2, 3, 4, 5, 6, 7, 8, 9]
[8, 0, 1]
[8, 0, 1]
| Operation | Running complexity |
|---|---|
| Access element by position | - |
| Prepend/remove first element | $O(1)$ |
| Append | $O(n)$, $O(1)$ for doubly linked list |
| Remove last element | $O(n)$, $O(1)$ for doubly linked list |
| Insert, remove from the middle | $O(n)$ |
| Traverse all elements | $O(n)$ |
| Find an element | $O(n)$ |
An abstract data type is the description of a data type, summarizing the possible data and the possible operations on this data. Here theres no need to specifiy the concrete representation of the data, only its capabilities. Its specifies behaviour, not implementation.
A stack is a datastructure which follows the last-in-first-out (LIFO) principle and supports the following operation:
class Stack(LinkedList):
def __init__(self):
super().__init__()
def push(self, item):
self.append(item)
def pop(self)-> Union[object, None]:
return self.remove_last_item()
s = Stack()
for i in range(10):
s.append(i)
print(s)
s.push(11)
print(s)
print(s.pop())
print(s)
[0, 1, 2, 3, 4, 5, 6, 7, 8, 9]
[0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 11]
11
[0, 1, 2, 3, 4, 5, 6, 7, 8, 9]
A queue is a data structure which follows the first-in-first-out (FIFO) principle and supports the following operation:
Queues are helpful if we need to store elements and process them in the same order.
class Queue(LinkedList):
def __init__(self):
super().__init__()
def enqueue(self, item):
self.prepend(item)
def dequeue(self):
return self.remove_last_item()
q = Queue()
for i in range(10):
q.append(i)
print(q)
q.enqueue(11)
print(q)
print(q.dequeue())
print(q)
[0, 1, 2, 3, 4, 5, 6, 7, 8, 9]
[11, 0, 1, 2, 3, 4, 5, 6, 7, 8, 9]
9
[11, 0, 1, 2, 3, 4, 5, 6, 7, 8]
A double-ended queue (deque) generalizes both, queues and stacks:
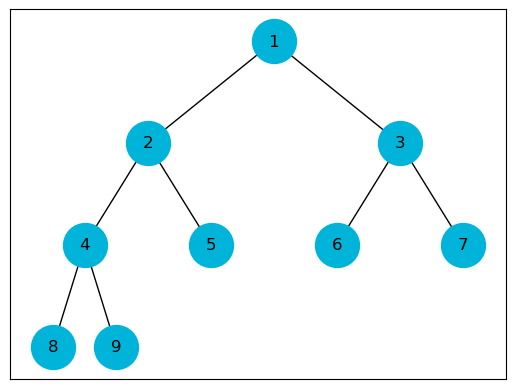
A binary tree is a tree where each node has at most 2 successor nodes. A nearly complete binary tree is filled on all levels except for the last one, where it is partially filled from left to right. There exist two different heaps
def _build_graph(g, a, k, x_pos, N):
height = math.floor(math.log(N+1, 2)) # Height of the tree
depth = math.floor(math.log(k, 2)) # Depth of the current node k
if k > N:
return
else:
y = (height - depth)
g.add_node(k, pos=(x_pos, y), label=str(a[k]))
if k > 1: g.add_edge(k, k // 2)
_build_graph(g, a, k * 2 , x_pos - 2**(height - depth), N)
_build_graph(g, a, k * 2 + 1, x_pos + 2**(height - depth), N)
def show_array_as_tree(a, N=None):
if N is None:
N = len(a) - 1
g = nx.Graph()
_build_graph(g, a, 1, len(a) / 2 + 1, N)
pos=nx.get_node_attributes(g,'pos')
labels = nx.get_node_attributes(g, 'label')
nx.draw_networkx_nodes(g, pos, node_size=1000, node_color='#00b4d9')
nx.draw_networkx_edges(g, pos)
nx.draw_networkx_labels(g, pos, labels)
plt.show()
Helper functions
def parent(i: int):
return i // 2
def right(i: int):
return 2 * i + 1
def left(i: int):
return 2 * i
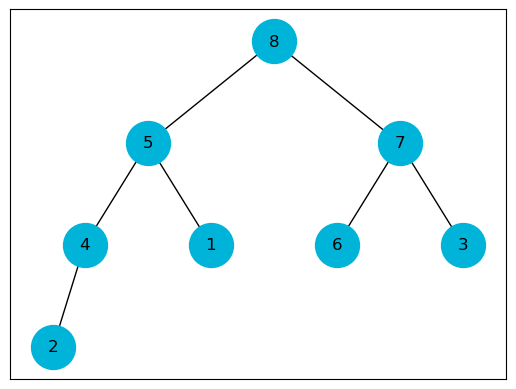
heap = [None, 1, 2, 3, 4, 5, 6, 7, 8, 9]
heap_size = len(heap) - 1
show_array_as_tree(heap)
Let h be the height of the subtree rooted at position i, then we have $O(h)$.
Let n be the number of nodes of the subtree rooted at position i. Each subtree has size at most $2n/3$, so for the worst-case running time T of sink, we have
\[T(n) \leq T(2n / 3) + \Theta(1)\]Which by the master theorem gives
\[T(n) \in O(\log_2 n)\]def sink(heap: list, i: int, heap_size: int):
l = left(i)
r = right(i)
if l <= heap_size and heap[i] < heap[l]:
largest = l
else:
largest = i
if r <= heap_size and heap[largest] < heap[r]:
largest = r
if largest != i:
heap[i], heap[largest] = heap[largest], heap[i]
sink(heap, largest, heap_size)
heap = [None, 1, 2, 3, 4, 5, 6, 7, 8, 9]
heap_size = len(heap) - 1
sink(heap, 1, heap_size)
show_array_as_tree(heap)
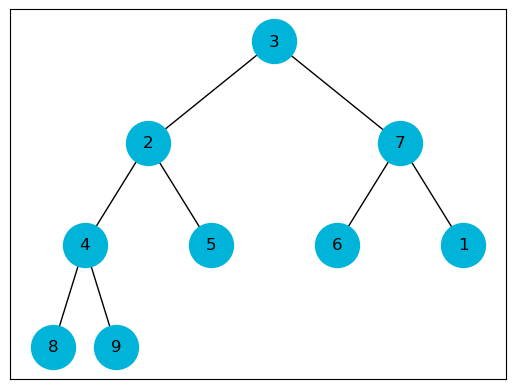
Swim also has a worts case running time of:
\[T(n) \in O(\log_2 n)\]def swim(heap: list, i: int):
p = parent(i)
if p >= 1 and heap[i] > heap[p]:
heap[i], heap[p] = heap[p], heap[i]
swim(heap, p)
heap = [None, 1, 2, 3, 4, 5, 6, 7, 8, 9]
heap_size = len(heap) - 1
swim(heap, heap_size)
show_array_as_tree(heap)
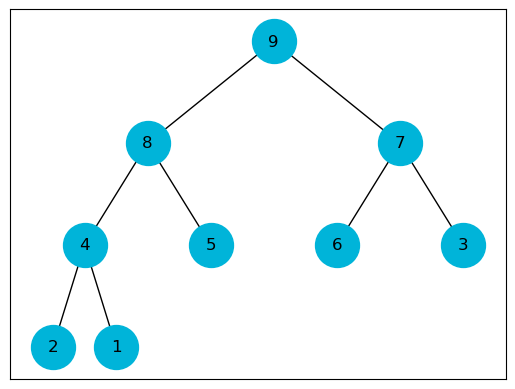
When building the max heap, we start at the second last node (a.k.a the parents of the leaves) and sink them if needed and iterate over all the then preceding nodes until we reach the root. A heap with n elements has a height of $\lfloor \log_2 n \rfloor$ and there are at most, $\lceil \frac{n}{2^{h + 1}} \rceil$ nodes rooting subtrees of height h. In total, the worst case running time is
\[T(n) \in O(n)\]def build_max_heap(heap: list, heap_size: int):
for i in range(heap_size//2, 0, -1):
sink(heap, i, heap_size)
heap = [None, 1, 2, 3, 4, 5, 6, 7, 8, 9]
heap_size = len(heap) - 1
build_max_heap(heap, heap_size)
show_array_as_tree(heap)
Finding the maximum of a max-heap is trivial as it is the element at the root of the tree.
\[T(n) \in \Theta(1)\]def max_heap_maximum(heap: list, heap_size: int):
if heap_size < 1:
return None
else:
return heap[1]
heap = [None, 1, 2, 3, 4, 5, 6, 7, 8, 9]
heap_size = len(heap) - 1
build_max_heap(heap, heap_size)
print(max_heap_maximum(heap, heap_size))
9
In $\texttt{max_heap_extract_max()}$ we remove the largerst element, replace it with the last element and sink it to restore the heap.
\[T(n) \in O(\log_2 n)\]def max_heap_extract_max(heap: list, heap_size: int):
maximum = max_heap_maximum(heap, heap_size)
heap[1] = heap[heap_size]
heap = heap[:-1].copy()
heap_size -= 1
sink(heap, 1, heap_size)
return heap, maximum
heap = [None, 1, 2, 3, 4, 5, 6, 7, 8, 9]
heap_size = len(heap) - 1
build_max_heap(heap, heap_size)
heap, max = max_heap_extract_max(heap, heap_size)
show_array_as_tree(heap)
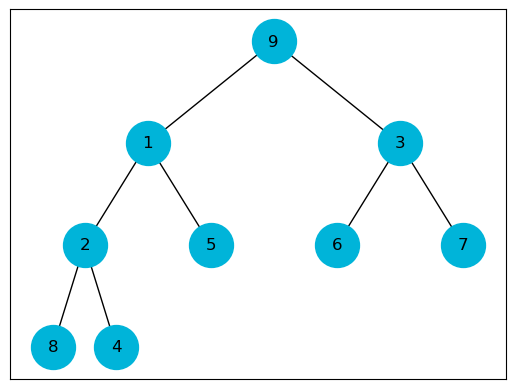
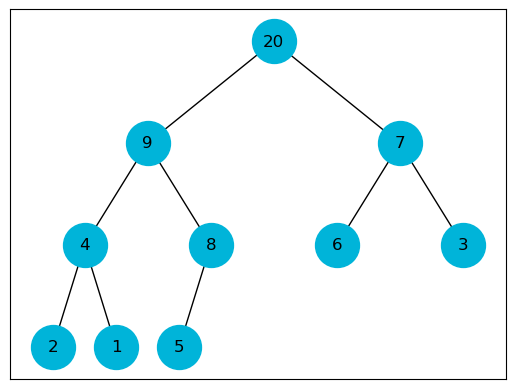
We insert new values as leaves and let them swim up to restore the heap
\[T(n) \in O( \log_2 n)\]def max_heap_insert(heap: list, item, heap_size: int):
heap.append(item)
heap_size += 1
swim(heap, heap_size)
heap = [None, 1, 2, 3, 4, 5, 6, 7, 8, 9]
heap_size = len(heap) - 1
build_max_heap(heap, heap_size)
max_heap_insert(heap, 20, heap_size)
show_array_as_tree(heap)
The concept works similair to selection sort, but here we sort from right to left. In heapsort we first build the ma heap such that the largest element is the root. We swap this element to the end of the list representation of the heap and the leave to the root and then look at the list[:-1] (so the same heap without the last heap which is now our max element). Then we perform sink on the new root giving us the new max heap. We repeat the same process until the list is sorted
Building the max heap takes linear time and n iterations over the loop where sink has a running time of $O( \log_2 n)$, so we get a total running time of:
\[T(n) \in O(n \log_2 n)\]def heapsort(array):
build_max_heap(array, len(array) - 1)
for i in range(len(array) - 1, 0, -1):
array[1], array[i] = array[i], array[1]
sink(array, 1, i - 1)
array = [None, 3, 5, 6, 2, 7, 0]
heapsort(array)
print(array)
[None, 0, 2, 3, 5, 6, 7]
A priority queue is an abstract data type for maintaining a collection of elements, each with an associated key and a max-priority queue supports the following operation
It can insert items with a priority (= key) and can then obtain the item with the highest priority (implementation via heaps)
Image we have $k$ keys coming from the set $U$, where k is a large or even an infinit number. To pack these into an array $T$ of size $m$, we use a hash function
\[h : U \mapsto \{0, ..., m-1 \}\](i.e. h = k mod m). We call $h(k)$ the hash value of $k$.
Because $k \gg m$ we can have overlap, causing different keys to be mapped to the same hash value. Here are two methods to work with these overlaps
In chaining every hash value points to a doubly linked list, where every key with the same hash value gets stored in that doubly linked list. Given an array T which stores the linked list at index $h(k)$.
Implementation
The running time of these operations is dependant on the running time of the doubly linked list.
A independent random uniform hash function is seen as the ideal function although it is impossible to implement. This function chooses the hash value from a uniform distribution over the values ${0, …,m-1 }$. The load factor $\alpha$ is defined as the ration of the number of stored elements and the number of positions in the hash table
\[\alpha = \frac{n}{m}\]$\alpha$ is then the average number of entries in a chain.
In a hash table in which collisions are resolved by chaining, a search (successful or unsuccessful) takes $\Theta(1 + \alpha)$ time on average, under the assumption of independent uniform hashing.
If the number of elements n is at most proportional to the number of slots $m (n \leq cm$ for constant $c > 0)$, then $\alpha \leq c \frac{m}{m} \in O(1)$. Then, the average running time of insertion, deletion and search is $O(1)$.
To maintain an upper bound on the load factor (and thus constant average running times of operations), we may need to increase the size of the table. The change from the previous size m to size m′ requires an adaptation of the hash function. In contrast to a size change of an array (where we just move every entry to the same index of the new memory range), we need to rehash all elements and insert them anew.
class ChainingHash:
def __init__(self, size: int):
self.hashmap = [None] * size
self.size = size
def hash(self, value: int):
return value % self.size
def add(self, value: int):
hash_key = self.hash(value)
if self.hashmap[hash_key] is None:
linked_list = LinkedList()
linked_list.append(value)
self.hashmap[hash_key] = linked_list
else:
self.hashmap[hash_key].append(value)
def search(self, value: int):
hash_key = self.hash(value)
if self.hashmap[hash_key] is not None:
return self.hashmap[hash_key].find(value)
return False
def remove(self, value: int):
hash_key = self.hash(value)
if self.hashmap[hash_key] is not None:
self.hashmap[hash_key].pop(value)
In open addressing, the entries are stored in the hash table itself, this has the consequence that the hash table cannot hold more entries than size $m$. Size adaption then may be needed. When inserting into the hash table, we first try the hash value, if that slot is occupied, we move to the right and move until we find an empty slot. For searching we do the same thing until we find the key or an empty slot. Linear probing with a load of $\alpha = \frac{n}{m} < 1$ has a worst running time, when the hash has only one slot and a key is not in the hash. The expected number of probes in an unsuccessful search is then at most on average:
\[\frac{1}{1 - \alpha} = 1 + \alpha + \alpha^2 + \alpha^3 + ...\]For a successful search, the expected number of probes is at most:
\[\frac{1}{\alpha} \log_e \frac{1}{1 - \alpha}\]assuming independent uniform permutation hashing with no deletions and assuming that each key in the table is equally likely to be searched for.
class LinearHash:
def __init__(self, size: int):
self.hashmap = [None] * size
self.size = size
def h(self, key: int, index: int):
pass
def g(self, key: int, index: int):
pass
def insert(self, value: int):
for i in range(self.size):
hash_key = self.h(value, i)
if self.hashmap[hash_key] is None:
self.hashmap[hash_key + i] = value
return hash_key
def search(self, value: int):
for i in range(self.size):
hash_key = self.h(value, i)
if self.hashmap[hash_key] == value:
return hash_key
if self.hashmap[hash_key] is None:
break
return None
def delete(self, index):
self.hashmap[index] = None
pos = index
while True:
pos = (pos + 1) % self.size
if self.hashmap[pos] is None:
return
key = self.hashmap[pos]
if g(key, index) < g(key, pos):
break
self.hashmap[index] = key
self.delete(pos)
In double hashing, we use two auxilairy hash functions $h_1$ and $h_2$ such that
\[h(k, i) = (h_1(k) + i h_2(k)) \ \text{mod} \ m\]where $h_1$ is the probe position and $h_2$ the step size and $h_2(k)$ must be relatively prime to m.
In linear probing we use the hash function $h_1 : U \mapsto {0, …, m-1}$ and probe the sequence as
\[\langle h_1(k),h_1(k) + 1,.... \rangle\]until we find empty slot. For deleting use function
\[g(k, q) = (q - h_1(k)) \ \text{mod} \ m \rightarrow h(k, i) = i \Rightarrow g(k, q) = i\]A tree is a binary search tree if:
A search tree supports the following operations:
For $\texttt{inorder_tree_walk(node)}$, the total running time is for $n$ nodes is:
\[\Theta(n)\]Given a tree depth of $h$, the running time for $\texttt{minimum}$, $\texttt{maximum}$, $\texttt{successor}$, $\texttt{insert}$ and $\texttt{delete}$ is:
\[O(h)\]To search for a key, we start at the root and compare the values. If the key is larger then the root, then we go to the right of the subtree, else left.
Finding the min / max of the BST is trivial. Because every value on the left of the parent is smaller, the smallest value is at the left most leave. Same goes for the max, which is at the right most leave.
Given a element of the BST, we want to find the next largest value in the tree. If there exist a right node at the given element, then taking the min value of the right subtree gives us the successor. If the right node doesn’t exist, then the successor is above the given element. We go up the tree, until the first node which is the left node of another. This parent is then the successor.

Given a element of the BST, we want to find the previous largest value in the tree. If there exist a left node at the given element, then taking the max value of the left subtree gives us the predecessor. If the left node doesn’t exist, then the successor is above the given element. We go up the tree, until the first node which is the right node of another. This parent is then the successor.
When inserting a new value, we start at the root and descend until the correct position
There exist different cases
class NodeBST:
def __init__(self, key, value):
self.key = key
self.value = value
self.parent = None
self.left = None
self.right = None
class BST:
def __init__(self):
self.root = None
def inorder_tree_walk(self, node: NodeBST):
if node is not None:
self.inorder_tree_walk(node.left)
print(f' {node.key} ')
self.inorder_tree_walk(node.right)
def search(self, root: NodeBST, key):
node = root
while node is not None:
if node.key == key:
return node
elif node.key < key:
node = node.right
else:
node = node.left
return None
def minimum(self, root: NodeBST):
node = root
while node.left is not None:
node = node.left
return node
def maximum(self, root: NodeBST):
node = root
while node.right is not None:
node = node.right
return node
def successor(self, node: NodeBST):
if node.right is not None:
return self.minimum(node.right)
parent = node.parent
while node is not None and node == parent.right:
node = parent
parent = node.parent
return parent
def insert(self, key, value):
node_tree = self.root
parent = None
while node_tree is not None:
parent = node_tree
if node_tree.key < key:
node_tree = node_tree.right
else:
node_tree = node_tree.left
node = NodeBST(key, value)
node.parent = parent
if self.root is None:
self.root = node
elif key < parent.key:
parent.left = node
else:
parent.right = node
def transplant(self, u, v):
if u.parent is None:
self.root = v
elif u.parent.left == u:
u.parent.left = v
else:
u.parent.right = v
if v is not None:
v.parent = u.parent
#u.parent = v
def delete(self, node: NodeBST):
if node.left is None:
self.transplant(node, node.right)
elif node.right is None:
self.transplant(node, node.left)
else:
s = self.minimum(node.right)
if s != node.right:
self.transplant(s, node.right)
s.right = node.right
node.right.parent = s
self.transplant(node, s)
s.left = node.left
s.left.parent = s
def draw(self, only_keys=False): # for drawing; you do not need to understand this code.
def visit(node, depth=0):
if node is None:
return None
left = visit(node.left, depth+1)
node_no = next(counter)
if only_keys:
labels[node_no] = f"{node.key}"
else:
labels[node_no] = f"{node.key}: {node.value}"
graph.add_node(node_no, depth=depth)
right = visit(node.right, depth+1)
if left is not None:
graph.add_edge(node_no, left)
if right is not None:
graph.add_edge(node_no, right)
return node_no
from itertools import count
counter = count() # for assigning numbers to nodes
labels = {}
graph = nx.Graph()
visit(self.root)
# done creating the networkx graph
pos = {node: (node, -graph.nodes[node]["depth"])
for node in graph.nodes}
nx.draw(graph, pos=pos, labels=labels, with_labels = True, node_size=1600, node_color='#ffffff')
bst = BST()
bst.insert(3, "La")
bst.insert(9, "Le")
bst.insert(10, "Lu")
bst.insert(6, "Di")
bst.insert(2, "Del")
bst.insert(4, "Du")
bst.insert(8, "Hu")
bst.inorder_tree_walk(bst.root)
#bst.draw()
2
3
4
6
8
9
10
Binary search trees can be nice, but under certain circumstrances degenerate into chains, in which case the operation take linear time. In Red black trees, we use on extra bit to store it’s color, either $\texttt{red}$ or $\texttt{black}$. Instead of many leave nodes, we can alternatively introduce a sentinel node $\texttt{nil}$, which is a black node but is a child of all leaves and the parent of the root.
A red black tree has then the properties:
The height of a red-black tree with $n$ inner nodes is at most:
\[2 \log_2 (n + 1)\]Let the black height $bh(x)$ of a node $x$ denote the number of black nodes on any simple parth from, but not including, x, down to a leaf. Firstly, we want to show that that the subtree rooted at any node $x$ contains at least $2^{bh(x)} - 1$ inner nodes.
Because each subtree rooted at $x$ contains atleast $2^{bh(x)} - 1$ inner nodes. If we let $h$ be the height of the tree. Since both children of a red node must be black, atleast half of the nodes on any simple path from the root to the a leaf (not including root) must be black, since after a red node there must be a black node, so atleast half of the nodes must be black. Thus the black-height of the root is atleast h/2 and thus
\[n > 2^{h/2} - 1 \Rightarrow h \leq 2 \log_2 (n + 1)\]Thus the height of a red-black tree is $O(\log_2 n)$. Because red-black-trees are binary search trees, all functionality which runs at $O(h)$, can with red-black-trees achieve a running time of $O(\log_2 n)$.
Inserting and deleting as in binary search trees is not possible as it does not preserve the red-black property. We use an operation called rotation to fix this.

class RedBlackTree:
class Node:
def __init__(self, key, value, color: str):
self.key = key
self.value = value
self.parent = None
self.left = None
self.right = None
self.color = color
def __init__(self):
self.nil = Node(None, None, color='BLACK')
self.root = self.nil
def left_rotate(self, x):
y = x.right
x.right = y.left
if y.left is not self.nil:
y.left.parent = x
y.parent = x.parent
if x.parent is self.nil:
self.root = y
elif x is x.parent.left:
x.parent.left = y
else:
x.parent.right = y
y.left = x
x.parent = y
During insertion and deletion, only two violations to the properties can occur:
For 1 we can just color the root black but for 2. the node and its parent are both red:
The running time for the fixup and insertion is
\[O(h)\]For deletion a running time of
\[O(\log_2 n)\]is possible
Dynamic set is a set which can grow, shrink or otherwise change, is finite and the entries (keys) can sometimes be associated with satellite data.
A map (dictionary) stores (key, value) pairs such that each possible key occurs at most once in the collection. It supports the following operations:
The datastructures: [Linked list, hash table, binary search tree, red black tree] can be used to implement maps.
A set stores keys such tha teach possible key occurs at most once in the collection. It supports the following operations:
Additional operations can be
The datastructures: [Linked list, hash table, binary search tree, red black tree] can be used to implement sets.
With sets we only store keys. The implementation of operations can be done based on core implementation or special algorithms and differ from datastructure. With red-black-trees, union, intersection etc can be done in $O(m \log(\frac{n}{m} + 1))$ for two red black trees of sizes $m$ and $n$ where $m \leq n$.
import numpy as np
```python import matplotlib.pyplot as plt import seaborn as sns import numpy as np
```python from future import annotations
A graph is a pair $(V, E)$ comprising of $V$, being a finite set of vertices and $E$ being a finite set of edges. Every edge connects two vertices $u$ and $...